






ทีมนักวิทยาศาสตร์จากมหาวิทยาลัยราดบูด (Radboud University) ในเนเธอร์แลนด์ และมหาวิทยาลัยนิวยอร์ก (New York University) ในสหรัฐอเมริกา ได้เผยแพร่ผลงานวิจัยสำคัญที่นำเสนอ กรอบแนวคิดใหม่ในการพัฒนาฝูงหุ่นยนต์ปัญญาประดิษฐ์ (Artificial Swarm Intelligence)
โดยอาศัยหลักการทางเรขาคณิตที่เลียนแบบการเคลื่อนที่และการประสานงานของสิ่งมีชีวิตในธรรมชาติ เช่น ฝูงนกที่บินรวมกัน หรือฝูงปลาที่ว่ายน้ำไปด้วยกัน งานวิจัยนี้ตีพิมพ์ในวารสาร Proceedings of the National Academy of Sciences
สรุปข่าว
ทีมนักวิทยาศาสตร์จากมหาวิทยาลัยราดบูด (Radboud University) ในเนเธอร์แลนด์ และมหาวิทยาลัยนิวยอร์ก (New York University) ในสหรัฐอเมริกา ได้เผยแพร่ผลงานวิจัยสำคัญที่นำเสนอ กรอบแนวคิดใหม่ในการพัฒนาฝูงหุ่นยนต์ปัญญาประดิษฐ์ (Artificial Swarm Intelligence)
โดยอาศัยหลักการทางเรขาคณิตที่เลียนแบบการเคลื่อนที่และการประสานงานของสิ่งมีชีวิตในธรรมชาติ เช่น ฝูงนกที่บินรวมกัน หรือฝูงปลาที่ว่ายน้ำไปด้วยกัน งานวิจัยนี้ตีพิมพ์ในวารสาร Proceedings of the National Academy of Sciences
แรงบันดาลใจจากธรรมชาติสู่ความท้าทายของ AI
พฤติกรรมของสัตว์ที่รวมกลุ่มกัน เช่น ฝูงนกเพื่อหาอาหารและเคลื่อนที่อย่างมีประสิทธิภาพ ปลาขนาดเล็กเพื่อหลีกเลี่ยงผู้ล่า หรือฝูงผึ้งเพื่อสืบพันธุ์ เป็นแรงบันดาลใจสำคัญในการสร้างระบบหุ่นยนต์ฝูงเพื่อภารกิจที่ซับซ้อน เช่น การค้นหาและกู้ภัย การสำรวจพื้นที่กว้างใหญ่ หรือการขนส่งสิ่งของ
อย่างไรก็ตาม หนึ่งในความท้าทายหลักของการออกแบบหุ่นยนต์ฝูงคือ การหากลไกควบคุมแบบกระจายศูนย์มาตัน ยาห์ เบน ไซอัน (Matan Yah Ben Zion) ผู้ช่วยศาสตราจารย์จากมหาวิทยาลัยราดบูด (Radboud University) และหนึ่งในผู้เขียนงานวิจัย อธิบายว่า "หุ่นยนต์ฝูงที่ทำงานในวงกว้างไม่สามารถพึ่งพาตัวควบคุมส่วนกลาง หรือการเขียนโปรแกรมที่ซับซ้อนได้ แต่ต้องการกฎง่าย ๆ ที่ทำให้พฤติกรรมกลุ่มที่ซับซ้อนเกิดขึ้นเองตามธรรมชาติ"
Curvity กุญแจสำคัญในการควบคุม
ทีมนักวิจัย มาเธียส คาซิอูลิส (Mathias Casiulis) และสเตฟาโน มาร์ตินิอานี (Stefano Martiniani) จากมหาวิทยาลัยนิวยอร์ก (New York University) ได้เสนอแนวคิดใหม่ที่เรียกว่า "Curvity" ซึ่งเป็นคุณสมบัติทางเรขาคณิตที่คล้ายกับ "ประจุไฟฟ้า" หุ่นยนต์แต่ละตัวจะได้รับค่า "Curvity" เป็นบวกหรือลบ ซึ่งเป็นตัวกำหนดว่ามันจะ ดึงดูดหรือผลักออกจากหุ่นยนต์ตัวอื่น
เบน ไซออน (Ben Zion) อธิบายว่า ปริมาณที่คล้ายประจุนี้สามารถเข้ารหัสโดยตรงในโครงสร้างทางกลของหุ่นยนต์ได้ เช่นเดียวกับประจุของอนุภาค ค่าของ "Curvity" จะกำหนดว่าหุ่นยนต์จะดึงดูดซึ่งกันและกันเพื่อจับกลุ่ม หรือผลักออกจากกันเพื่อรวมฝูง หลักการนี้ช่วยให้ฝูงหุ่นยนต์ตัดสินใจได้ว่าจะ รวมฝูง (Flock), ไหล (Flow), หรือจับกลุ่ม (Cluster) ได้อย่างเป็นธรรมชาติ
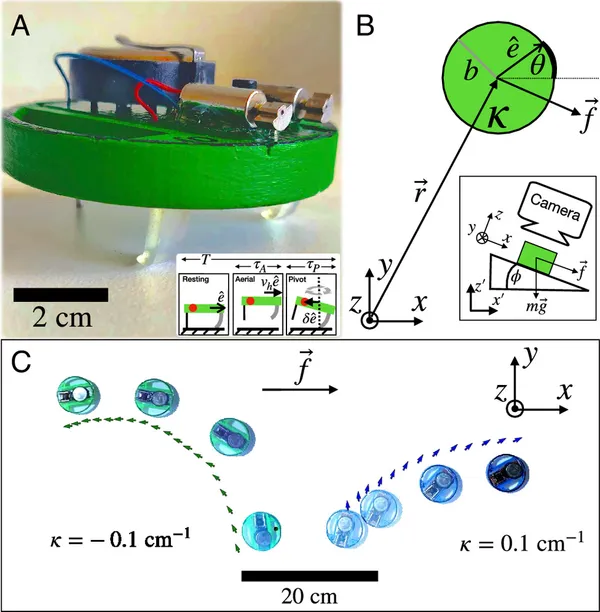 ภาพการวัดความโค้ง ของอนุภาคที่ขับเคลื่อนด้วยตัวเอง ( A ) หุ่นยนต์ขับเคลื่อนด้วยการสั่นสะเทือน แสดงมอเตอร์สั่นสะเทือนสองตัว ขาหน้าแบบนิ่มสองขา และขาหลังแบบแข็งภาพประกอบแสดงการเคลื่อนที่
ภาพการวัดความโค้ง ของอนุภาคที่ขับเคลื่อนด้วยตัวเอง ( A ) หุ่นยนต์ขับเคลื่อนด้วยการสั่นสะเทือน แสดงมอเตอร์สั่นสะเทือนสองตัว ขาหน้าแบบนิ่มสองขา และขาหลังแบบแข็งภาพประกอบแสดงการเคลื่อนที่
ความเรียบง่ายและศักยภาพในการประยุกต์ใช้
นักวิทยาศาสตร์ได้ทำการทดลองที่แสดงให้เห็นว่ากฎง่าย ๆ ที่อิงตาม "Curvity" สามารถนำทางให้หุ่นยนต์ปฏิสัมพันธ์กันได้ ไม่ใช่แค่คู่เดียว แต่สามารถขยายไปถึงหุ่นยนต์หลายพันตัว มาเธียส คาซิอูลิส (Mathias Casiulis) นักวิจัยหลังปริญญาเอกที่มหาวิทยาลัยนิวยอร์ก (New York University) เสริมว่า กฎเหล่านี้อิงจากกลไกพื้นฐาน ทำให้การนำไปใช้ในหุ่นยนต์จริงเป็นเรื่องง่าย
งานวิจัยนี้ถือเป็นการเปลี่ยนความท้าทายในการควบคุมฝูงหุ่นยนต์ให้กลายเป็นการฝึกฝนด้านวัสดุศาสตร์ โดยนำเสนอ กฎการออกแบบที่เรียบง่ายเพื่อแจ้งการออกแบบฝูงในอนาคต
แนวคิด "Curvity" นี้มีศักยภาพในการนำไปใช้กับหุ่นยนต์หลากหลายประเภท ตั้งแต่หุ่นยนต์อุตสาหกรรม หุ่นยนต์จัดส่ง ไปจนถึงหุ่นยนต์ขนาดเล็กระดับเซลล์ (Microscopic robots) ซึ่งอาจปรับปรุงการนำส่งยาและการรักษาทางการแพทย์อื่น ๆ
โดยสรุปแล้ว การค้นพบ "Curvity" นี้เป็นการเปิดประตูสู่การพัฒนาปัญญาประดิษฐ์ฝูงที่มีประสิทธิภาพและมีความสามารถในการประยุกต์ใช้ในวงกว้างในอนาคต ทำให้การควบคุมหุ่นยนต์จำนวนมากเป็นไปได้ราวกับฝูงปลาและนกในธรรมชาติ
- ศูนย์ราชการแจ้งวัฒนะฯ เตรียมอัปศูนย์ราชการอัจฉริยะด้วย Smart Facility Management จาก Metthier
- AI ช่วยตรวจจับ “มะเร็งผิวหนัง” โดยไม่จำเป็นต้องเจาะชิ้นเนื้อ
- ผลสำรวจเผย คนไทยเรียกร้องให้แบรนด์เปิดเผยเกี่ยวการใช้ AI พร้อมแนะให้รัฐจัดการศึกษาเกี่ยวกับ AI อย่างครอบคลุม
- "Perplexity" ยื่นข้อเสนอซื้อกิจการ Google Chrome 1.1 ล้านล้านบาท
ที่มารูปภาพ : Luco Buise

