





จุฬาฯ เปิดตัว วีลแชร์เดินได้ - Wheelchair Exoskeleton หุ่นยนต์ที่เป็นทั้งรถเข็นผู้พิการและตัวค้ำยืนได้ตัวแรกของโลก

รศ.ดร.รณพีร์ ชัยเชาวรัตน์ อาจารย์จากสำนักบริหารหลักสูตรวิศวกรรมนานาชาติ คณะวิศวกรรมศาสตร์ จุฬาลงกรณ์มหาวิทยาลัย เปิดห้องปฏิบัติการแสดงหุ่นยนต์ต้นแบบวีลแชร์เดินได้ (Wheelchair Exoskeleton) สำหรับผู้สูงอายุและผู้มีปัญหาด้านการเคลื่อนไหว ให้สามารถขยับลุกจากการนั่งวีลแชร์ มายืนและเดินได้ในหุ่นยนต์ตัวเดียว
สรุปข่าว
รศ.ดร.รณพีร์ ชัยเชาวรัตน์ อาจารย์จากสำนักบริหารหลักสูตรวิศวกรรมนานาชาติ คณะวิศวกรรมศาสตร์ จุฬาลงกรณ์มหาวิทยาลัย เปิดห้องปฏิบัติการแสดงหุ่นยนต์ต้นแบบวีลแชร์เดินได้ (Wheelchair Exoskeleton) สำหรับผู้สูงอายุและผู้มีปัญหาด้านการเคลื่อนไหว ให้สามารถขยับลุกจากการนั่งวีลแชร์ มายืนและเดินได้ในหุ่นยนต์ตัวเดียว
หุ่นยนต์ Wheelchair Exoskeleton คืออะไร?
Wheelchair Exoskeleton เป็นหุ่นยนต์สวมใส่บนร่างกายเพื่อช่วยการเคลื่อนไหวของมนุษย์ มีลักษณะเป็นได้ทั้งวีลแชร์และแปลงเป็นหุ่นยนต์ โดยชื่อ Exoskeleton มาจาก 2 คำ คือ Exo แปลว่าข้างนอก และ Skeleton แปลว่าโครงกระดูก เมื่อรวม 2 คำนี้ด้วยกัน แปลได้ตรงตัวว่า “โครงกระดูกภายนอก” ซึ่งในทางเทคนิคแล้วเป็นการใช้เครื่องจักรกลประกอบหุ่นยนต์ให้ผู้สวมใส่สามารถออกแรงได้มากขึ้น
Wheelchair Exoskeleton ได้รับการออกแบบชิ้นส่วนทุกชิ้นของหุ่นยนต์อย่างละเอียด โดยใช้โปรแกรมสามมิติจากคอมพิวเตอร์ และวัสดุแบบกำหนดเอง โดยรศ.ดร.รณพีร์ ชัยเชาวรัตน์ หัวหน้าทีมพัฒนา ได้เลือกใช้คาร์บอนไฟเบอร์ ที่มีน้ำหนักเบาและผลิตโดยเครื่องพิมพ์สามมิติ บางชิ้นส่วนตัดโดยเครื่องกลึง CNC (Computer Numerical Control)
การควบคุมการเคลื่อนไหวของ Wheelchair Exoskeleton แบ่งออกเป็น 2 ส่วน ส่วนแรก คือ ล้อ ซึ่งได้กลุ่มนิสิตมาช่วยเขียนโปรแกรมล้อหน้าให้สามารถวิ่งตรงและเลี้ยวโค้งได้ ส่วนที่สองเป็นมอเตอร์ควบคุมข้อต่อสะโพกกับหัวเข่า เพื่อผสมผสานรถเข็นและ Exoskeleton เข้าด้วยกัน
เมื่อใช้งาน ขาช่วงล่างสามารถเปลี่ยนโหมดการใช้งานได้ระหว่างนั่งและเดิน โดยใช้มอเตอร์ช่วยในการเคลื่อนไหวของข้อต่อสะโพกและหัวเข่า ส่วนข้อต่อข้อเท้าเป็นข้อต่ออิสระ ไม่มีการขับเคลื่อน ล้อซ้ายและขวาสามารถเก็บเข้าไปในส่วนขาส่วนล่าง เพื่อเปลี่ยนเป็นท่าเดินหรือข้ามสิ่งกีดขวางได้
องค์ความรู้ที่ใช้พัฒนาหุ่นยนต์ Wheelchair Exoskeleton จากจุฬาฯ
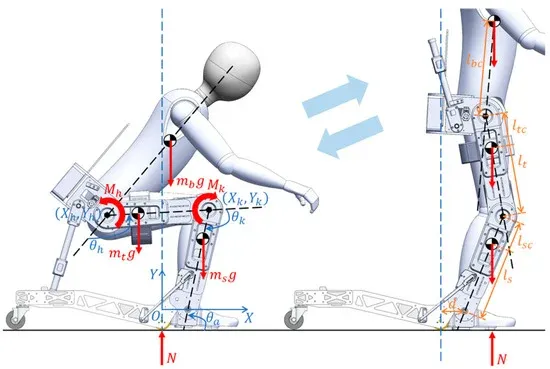
การออกแบบหุ่นยนต์ได้ใช้หลักการที่เรียกว่า Kinematics Compatibility หรือความเข้ากันได้เชิงจลศาสตร์ ในการออกแบบหุ่นสวมใส่บนร่างกาย เนื่องจากกระดูกมนุษย์เป็นกระดูกถ้วยกับกระดูกก้อนที่มาต่อแบบเลื่อนหมุนกัน แต่กลไกมอเตอร์นั้นหมุนรอบแกนหมุนแกนเดียว เมื่อเอามอเตอร์มาติด จะไม่สอดคล้องกับสรีระคนโดยตรง
รศ.ดร.รณพีร์ จึงออกแบบข้อต่อหัวเข่าให้เป็น Linkage หรือแบบเชื่อมโยง เพื่อให้เส้นทางการเคลื่อนที่ของจุดศูนย์กลางการหมุน สามารถเลียนแบบกระดูกจริง ส่วนข้อต่อที่มีการงอขามากจะใช้ข้อต่อแบบ Four-bar Linkage เพื่อให้จุดหมุนเปลี่ยนไปตามข้อต่อได้ สวมแล้วไม่ยืดหรือไม่หด ไม่ระคายผิวหนัง ทุกครั้งที่เหวี่ยงขาจริง Exoskeleton ก็ต้องเหวี่ยงไปด้วย เวลางอหัวเข่า หัวเข่าของหุ่นยนต์ก็ต้องงอไปพร้อมกัน โดยอาศัยองค์ความรู้ด้าน Biomechanic หรือชีวกลศาสตร์ ซึ่งสามารถคำนวณแรงบิดที่เกิดขึ้นจากรอบข้อเท้า หัวเข่า และสะโพกได้ เพื่อนำข้อมูลไปสร้างหุ่นยนต์ที่เหมาะสมกับสรีระของมนุษย์
เป้าหมายและอนาคตของหุ่นยนต์ Wheelchair Exoskeleton จากจุฬาฯ
ปัจจุบัน Wheelchair Exoskeleton ยังคงเป็นเพียงตัวต้นแบบเพื่อพิสูจน์ความเป็นไปได้ทางทฤษฎี (Proof of Concept) เท่านั้น โดยแนวคิดดังกล่าวมาจากการเห็นปัญหาว่า วีลแชร์ปกติเคลื่อนที่ได้ตามทางปกติ แต่ขึ้นรถเมล์ไม่ได้ ขึ้นลงบันไดไม่ได้ ทีมพัฒนาจึงเชื่อว่าถ้าวีลแชร์สามารถพับขึ้นมาแล้วช่วยให้ผู้นั่ง ลุกขึ้นมาเดินได้ ก็จะสามารถทำให้ผู้ที่มีปัญหาทางการเคลื่อนไหวเดินได้สะดวกมากยิ่งขึ้น
นอกจากนี้ การพัฒนาหุ่นยนต์ภายใต้ห้องปฏิบัติการหุ่นยนต์ ยังเป็น Alternative Solution ของการศึกษา เพื่อสร้างสภาพแวดล้อมการพัฒนาที่มีเครื่องมือให้นิสิตได้ประกอบหุ่นยนต์ในเวลาว่างจากการเรียน นำเสนอแนวคิดที่อยากทำในที่ประชุม แล้วค่อยทดลองทำ ก่อนที่จะนำนวัตกรรมไปทดสอบกับผู้ใช้งานจริงต่อไป พร้อมเคลมว่าเป็นหุ่นยนต์ Wheelchair Exoskeleton ตัวแรกของโลกที่สร้างโดยฝีมือคนไทย
หุ่นยนต์ Wheelchair Exoskeleton ได้รับการสนับสนุนทุนวิจัยจากสำนักการวิจัยแห่งชาติในปี พ.ศ. 2564 – 2565 และได้ผ่านเข้ารอบสุดท้ายในโครงการรางวัลนักเทคโนโลยีรุ่นใหม่ ประจำปี 2024 จัดโดยมูลนิธิส่งเสริมวิทยาศาสตร์และเทคโนโลยีในพระบรมราชูปถัมภ์อีกด้วย
โดยทีมพัฒนาอยู่ระหว่างพัฒนาหุ่นยนต์ Wheelchair Exoskeleton ต้นแบบตัวที่สอง โดยแก้ไขเรื่องการนั่ง การลุกให้มั่นคงและเดินได้สะดวกกว่าเดิม และกำลังอยู่ระหว่างการยื่นขอจดทรัพย์สินทางปัญญา พร้อมเตรียมประสานผู้เชี่ยวชาญด้านสถาปัตยกรรมศาสตร์มาช่วยออกแบบหุ่นยนต์ และผู้เชี่ยวชาญจากสหเวชศาสตร์เพื่อช่วยทดสอบการใช้งานจริงกับผู้ป่วยและผู้สูงอายุต่อไป

ข้อมูลจาก จุฬาลงกรณ์มหาวิทยาลัย
- OpenThaiGPT ก้าวกระโดดแห่ง AI ภาษาไทย ที่พัฒนาโดยคนไทย เพื่อคนไทย
- รู้จัก MOU43 คืออะไร แล้วมีความสำคัญอย่างไร กับชายแดนไทย-กัมพูชา
- Hermeus ทดสอบเครื่องบินไฮเปอร์โซนิก Quarterhorse Mk 1 สำเร็จ เดินหน้าพัฒนาเครื่องรุ่นใหม่สิ้นปีนี้
- วิสัยทัศน์ “ASEAN 2045: Our Shared Future” คืออะไร ที่นายกฯ แพทองธารเพิ่งลงนามไปที่กรุงกัวลาลัมเปอร์
- ทรัมป์เตรียมผลักดันพลังงานนิวเคลียร์ รองรับปัญญาประดิษฐ์ (AI) และศูนย์ข้อมูลในสหรัฐฯ
- สัดส่วนผู้ใช้งาน ChatGPT รายเดือนต่อประชากรในอาเซียน
ที่มาข้อมูล : จุฬาลงกรณ์มหาวิทยาลัย
ที่มารูปภาพ : จุฬาลงกรณ์มหาวิทยาลัย

TNNThailand
